1. はじめに¶
重要
このドキュメントに記載されている仕様は予告なく変更される場合があります。このドキュメントは情報提供を目的としたものであり、仕様を保証するものではありません。
説明で使用している画面は一例です。ご使用の環境やアプリケーションのバージョンによって、表示や手順が一部異なる場合があります。
注釈
このドキュメントに記載されている会社名、サービス名、製品名等は、一般に、各社の登録商標または商標です。本文および図表中には、「™」、「®」は明記していません。
1.1. intdash Bridgeとは¶
intdash Bridgeは、エッジデバイスにおいて、ROS空間とintdash Edge Agentの間を仲介するソフトウェアです。 intdash Bridgeを使用することにより、ROS空間とintdashサーバーとの間で、ROSメッセージのやり取りが可能になります。
intdash Bridgeは、intdash Edge Agentに対しては1つのデバイスコネクターとして振る舞い、ROS空間では1つのROSノードとして振る舞います。 これにより、ROS空間で受信したメッセージをintdashサーバーへ送信することができ(アップストリーム)、また、intdashサーバーから受信したメッセージをROS空間に送信することができます(ダウンストリーム)。
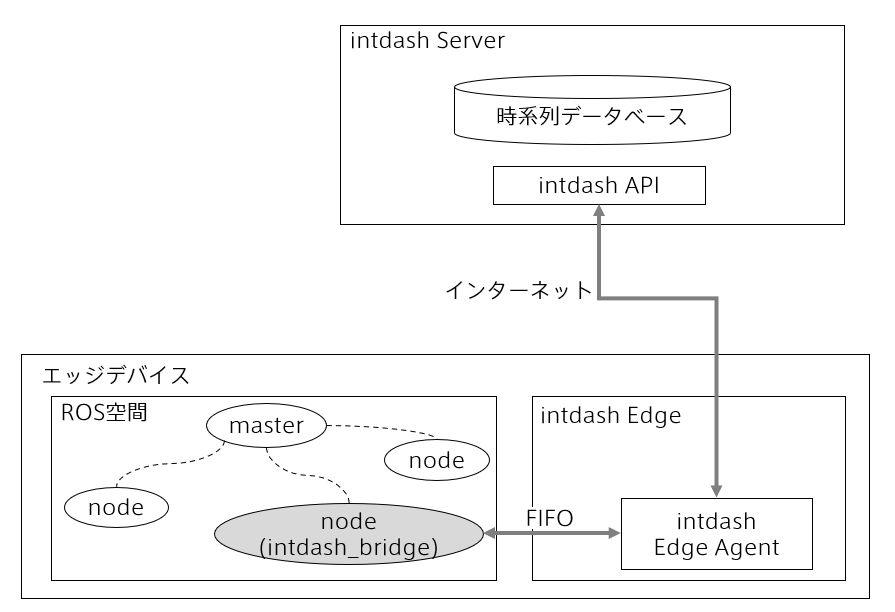
図 1 intdash Bridgeの機能¶
1.2. intdash Bridgeの主要機能¶
ROSメッセージのサブスクライブと、サブスクライブしたROSメッセージのintdash Edge Agentへの送信
intdash Edge Agentからのデータの受信と、受信したメッセージのROS空間内へのパブリッシュ
注釈
intdash Bridgeは、トピックによるROSメッセージのサブスクライブとパブリッシュのみに対応しています。
1.3. 動作要件¶
intdash Bridgeの動作には、intdash Edge Agentが必要です。
intdash Bridgeが動作するROSのディストリビューションは以下のとおりです。
ROS Melodic
ROS Noetic